نصب و راه اندازی سیستم اتوپایلوت بر روی هواپیمای بدون سرنشین
- 1392/12/18
- 2 دیدگاه
وسایل نقلیه هوایی بدون سرنشین (پهپادها) در سراسر جهان در طیف گستردهای از برنامههای نظامی و غیرنظامی و همچنین به علت هزینهی کم در تولید و قابلاعتماد بودن آن در انجام کارهای محوله کاربرد دارند.امروزه نیاز به خلبان خودکار (اتو پایلوت
) طور محسوسی مشاهده میشود به طوری که در گذشته برای هدایت هواپیما و ناوبری از خلبان کمک گرفته می شده و خلبان با توجه به سنسورها و نشانگرها از وضعیت هواپیما آگاه می شده و پس از اتخاذ تصمیم مناسب دستورات کنترلی را به دستگاه پروازی(هواپیما)میدادند، ولی در هواپیماهای امروزی هدایت هواپیما و ناوبری و تشخیص مسیر صحیح (هواپیما در مسیر صحیح به سمت مقصد قرار گیرد) را خلبان خودکار بر عهده دارد. سالیان متمادی میباشد که هواپیماهای بزرگ و بمبافکنها به سیستم خلبان خودکار مجهز گردیده اند تا خلبان بتواند بدون خستگی ساعتها بر فراز قاره ها و اقیانوسها هواپیما را هدایت کند.(شکل1)

شکل1- بورد خلبان خودکار-شرکت سازنده نوسترومو دیفنزا
نمونه ای ازیک برد یک سیستم اتو پایلوت را در(شکل 1) نشان داده ایم. این برد بر دیتاهای ورودی و خروجی هواپیما نظارت دارد و این شکل صرفا جهت آشنایی است.
1-1- انواع دسته بندی هواپیماهای مدل(پهپاد):
الف ـ دسته بندی پهباد ها از نظر نوع هدایت:
1- پهبادهای رادیوکنترل
: پهبادهایی هستند که توسط سیستم فرستنده و گیرنده رادیوکنترل هدایت میشوند .

شکل2-هواپیما با رادیو کنترل
نمونه ای از پهبادهای رادیو کنترل در( شکل 2)نشان داده شده است. خلبان با سیستم رادیو کنترل قادر به هدایت پهباد است.
2-
پهباد های کنترل لاین: پهبادهایی هستند که با ریسمان یا سیم متصل به آنها کنترل می شوند .
این پهباد ها فقط می توانند در سطح یک نیمکره به شعاع طول ریسمان که مرکز آن شخص کنترل کننده است پرواز کنند.
3- پهباد های پرواز آزاد :این پهباد ها پس از پرتاب، بطور آزادانه در هوا پرواز میکنند . مانند گلایدرهای مدل پرواز آزاد و پهباد های موتور کشی.
2-1- دسته بندی پهباد های مدل از نظر نوع موتور:
1- پهبادهای مدل موتور پیستونی : هواپیمای مدلی هستند که از موتورهای پیستونی نوع دو زمانه ، چهار زمانه (که سوختآنها الکل و یا بنزین است ) استفاده می کنند. (شکل2).
2- پهبادهای الکتریک : پهبادهایی مدلی که از موتورهای الکتریکی از نوع بریش یا بریشلز استفاده می کنند. (شکل3)

شکل3 نمونه ای از موتور برشلس یا جاروب الکتریکی- شرکت کریمن
3- پهبادهای داکتد فن: پهباد های جت مدلی هستند که از موتورهای داکتد فن استفاده می کنند .موتورهای داکتدفن موتور های پیستونی یا الکتریکی هستند که به جای ملخ از فن استفاده نموده و در یک مجرای استوانهای شکل (داکت) قرار می گیرند تا نقش موتور جت را ایفا کنند. (شکل4)

شکل4-موتور داکت فن –ناسا
در (شکل4) نوع خاصی از پهباد با موتور داکت فن مشاهده میشود که امتیاز عمود پروازی را داراست.
4- پهبادجت: پهباد هایی هستند که از موتورهای جت کوچک (مینی جت) استفاده می کنند. در شکل5 نوع نظامی و بزرگ ان که برای مصارف نظامی کاربرد دارد نشان داده شده است.
3-1- دسته بندی نوع کیتهای هواپیمای موجود در بازار جهانی
1-پهباد شرکتی اسباب بازی
: بال و بدنه و کیتهایی هستند که تمام متعلقات لازم بر روی آنها نصب شده و آماده پرواز هستند در این کیتها ، موتور-سرووها و غیره رسیور – لینکهای رابط – باک سوخت و غیره نصب شده اند و خریدار در کمتر از ده دقیقه میتواند آماده پرواز نماید و نیاز چندانی به تخصص در رابطه با نصب قطعات ندارند .
2- پهباد شرکتی بزرگ پیکر
:کیتهایی هستند که کاملا آماده پرواز نبوده و شما به تجربه مونتاژ و یک تا ۵ روز وقت جهت تکمیل آنها نیاز دارید . در این کیتها ، موتور – سرووها و رسیور – لینکهای رابط – باک سوخت و غیره باید توسط نصاب صحیح نصب شوند.
3- پهباد های نظامی یا همان پهن پیکر
:این کیتها شامل مجموعه ای از چوب – چوب بالسا – ورق چوب سه لایی و یک نقشه که باید طبق آن قطعات چوبی را به هم متصل کرده وهواپیما را ساخت. معمولا ساخت این نوع از کیتها زمان طولانی ای را از ۲ هفته تا ۲ ماه نیاز دارد. در خلال جنگ جهانی دوم از این سیستم برای هواپیماهای پشتیبانی به این دلیل که میبایستی ماموریتشان رابه طور پیوسته و با عبور از اقیانوسها و قاره ها به انجام می رسانیدند استفاده می گردید امروزه سیستم خلبان خودکار تقریبا بر روی تمام هواپیماها قابل نصب میباشد و بر روی هواپیماهای شخصی جهت سهولت پرواز هدایت اسان نیز نضب می گردد یکی از سیستمهای خلبان خودکار سیستم itt است که برگرفته از نام عمومی پرواز میباشد سیستم خلبان خودکار itt یک سیستم الکترومکانیکی میباشد که ازژیروسکوپها جهت تولید سیگنال الکتریکی استفاده می کنند. واین سیگنالها باعث کارکرد رله های کنترل مربوط به موتورهای فرمان پذیر میشود با کارکرد این موتورها سظوح کنترل فرامین به گونه ای حرکت می کند که هواپیما در وضعیت مناسب وکروز قرار گیرد یکی دیگر از سیستم های خلبان خودکار سیستم تراشه خودکار میباشد که در این سیستم ژیروسکوپها به عنوان حساسگر وضعیت هواپیما استفاده میشود وسیگنال بوجود می آورند که تصحیح کند حرکت بالابرها شهپرها وسکان عمودی میباشد در این روش سیگنال کاربردی تقویت می گردد و جهت تصحیح ان توسط سیستم الکترونیکی به گونه ای انتخاب میشود که کنترل کامل جفت کننده تقریب را فراهم نماید این جفت کننده سیگنالهایی تولید میکند که از سیستم ils گرفته شده و هواپیما را در وضیت مناسب نشست قرار می دهد. اساس کار خلبان خودکار نسبتا ساده میباشد وتمام نیازمندیهای این سیستم توسط حساسگرها و تولید سیگنال میباشد و اگر هواپیما دروضیت و موقیت نامناسب باشد سیگنالی درجهت تصحیح موارد فوق صادرمی نماید و سطوح فرامین جهت تصحیح وضعیت و موقعیت حرکت کنند.
بهترین نوع حساسگر جایرو یا ژیروسکوپ میباشد.

شکل5-هواپیمای نظامی X-48Bبا موتور جت- شرکت ناسا
2- پهباد های راديو كنترل:
اولين نمونه بسيار ابتدايي راديو كنترل در شهر نيويورك، در سال 1898 به نمايش درآمد. اين دستگاه را نيكولا تسلا به عنوان يكي از 113 اختراعش به ثبت رسانيد. در پي اين تحقيقات ارتش به حمايت مالي تسلا برآمد و او طرحهاي تحقيقاتي بسياري را در زمينه راديو كنترل و سيستمهاي مخابراتي براي ارتش انجام داد. او در اواسط سال 1930 يك هواپيماي كوچك راديو كنترل ابتدايي با موتور گازوئيلي ساخت.
در سال 1936 اولين مسابقه هواپيماي مدل راديو كنترل برگزار شد كه هنوز زود بود. در سال 1937 مسابقات هواپيماي مدل راديويي 6 شركت كننده داشت كه فقط يك هواپيما توانست سالم به زمين بنشيند. در سال 1938 يك بار ديگر مسابقات توسط انجمن موتور سيتي آمريكا برگزار شد.
اين بار تعداد شركت كنندگان به 26 نفر افزايش يافت. اما فقط 6 شركت كننده توانستند قابليت پرواز هواپيمايشان را به نمايش بگذارند. در مسابقات سال 1939 داوران به عملكرد راديو كنترل، چه بر روي زمين، چه در پرواز اهميت بيشتري داده بودند.
در اين مسابقات برادران گود ( والت و بيل ) با بدست آوردن 89 امتياز از 100 امتياز مقام اول را بدست آوردند. در حالي كه نفر دوم تنها 11 امتياز را بدست آورده بود. برادران گود قبل از مسابقات 1939 بيش از 60 دستگاه راديو كنترل را آزمايش و بكار گرفته بودند.
آنها بعد از سال 1940 چندين بار مقام اول مسابقات را بدست آوردند و اين موفقيتها بعد از جنگ جهاني هم ادامه داشت. تاريخ، تكامل راديو كنترل و هواپيماي راديويي را مديون تلاش و فداكاري بسيار اين دو برادر است.
هواپيماي موفق آنها به نام گوف هم اكنون در موزه هوافضاي واشنگتن نگهداري ميشود.يكي ديگر از افراد پيشگام در زمينه هواپيماي مدل راديو كنترل ، ژوزف راسپانته ميباشد. او يك طراح و سازنده استثنايي بود. او خيلي زود تكنولوژي الكترونيك و هواپيماي مدل موتوردار را با هم تركيب كرده و بكار گرفت.
سيستم راديو كنترل او كه از مكانيسم شمارهگير تلفن الهام گرفته بود، داراي عملكرد بهتري نسبت به رقبا بود. او مقام دوم مسابقات سال 1939 و 1940 را بدست آورده بود و سرانجام در سال 1946 مقام اول را بدست آورد.
با پيشرفت علم در زمينه نيمه هاديها و بوجود آمدن ترانزيستورها و مدارات كوچك الكترونيكي، راديو كنترلها نسبت به گذشته پيچيدهتر شدهاند. با نظر به گذشته پي ميبريم كه پيشگامان راديو كنترل هديه بسيار بزرگي را با تلاش و پشتكارشان به ما هديه كرده و كاري به مراتب بزرگتر از چيزي كه بتوان آن را فقط تركيبي از سيستمهاي الكترونيكي و مكانيكي دانست، انجام دادهاند و بدون اين تلاشها امروزه بدون شك نميتوانستيم به سيستمهاي پيشرفته فرستنده و گيرندههاي راديو كنترل دست يابيم.
راديو كنترلهاي پيشرفته ديجيتالي، قابليتهاي بسياري را پيش روي ما قرار دادهاند و با تنظيمات و تركيبات نرمافزاري ميتوان بازده بسيار بيشتري را با رعايت سادگي و سبكي مجموعه بدست آورد.
2-1- پهباد های راديو كنترل در ايران:
اين هنر و صنعت در سال 1964 ( 1343 ) در محل فرودگاه مهرآباد توسط دو نفر انگليسي به نامهاي پيتر كابرول و فيل اسميت عملاً پا به كشور ايران نهاد.
از آن به بعد باشگاه هواپيمايي كشوري متولي گسترش اين فن و ارائه خدمات به جوانان علاقمند شد كه برخي فعاليتهاي اين بخش تاكنون ادامه دارد؛ با اين تفاوت كه بعد از انقلاب اسلامي بودجه و فعاليت آن به ميزان قابل توجهي كاهش يافت و اشخاص عادي علاقمند به اين رشته هم اكنون فعاليت بيشتري نسبت به اعضاء باشگاه هواپيمايي كشوري انجام ميدهند
در ادامه برای آشنایی بیشتر با سیستم اتو پایلوت ابتدا با سیستم رادیو کنترل و اجرای پهباد رادیو کنترلی آشنا می شویم.
2-2- اجزای سیستم رادیو کنترل:
پهباد ها از سیستم رادیو کنترل که در قسمت تاریخچه به ان اشاره شد بهره می گیرند در سیستم رادیو کنترل پهباد باید در محدوده ی دید باشد ولی امواج رادیو کنترل قدرت کافی برای فرستادن اطلاعات کنترلی به فاصله های دور را ندارد و تشخیص پارامتر های زیر مشکل یا ناممکن میشود.
1-تشخیص جهت حرکت هواپیما
2-سرعت هواپیما
3-تراز بودن هواپیما
مسلما خلبان برای کنترل پهباد باید دارای تجربه ی لازم جهت تشخیص حرکت پهباد یا موارد دیگر باشد تا بتواند به صورت دیداری این موارد را تشخیص دهد و دستورات لازمه را جهت کنترل پهباد به پهباد اعمال کند و پهباد را در وضعیت مناسب جهت پرواز یا اجرای ماموریت قرار دهد.
بعلت وجود مشکل محدودیت خاصی در زمینه کاربردهای نظامی بوجود می آید بعنوان مثال میتوان به حالتی اشاره نمود که در آن یک سرباز ساده در میدان نبرد خلبان پهباد ماهری نیست ولی سرباز لایقی است مسلما از او انتظار هدایت ماهرانه یک پهباد نمی رود و درک این امر بدیهی است.(شکل 2)
2-2-1- کنترل کننده ی رادیو کنترل :
درشکل6 تصویر رادیو کنترل آورده شده است که دستورات لازم را به وسیله ی آن میتوان به پهباد داد (شکل 6)

شکل6- تصویر رادیو کنترل
این دستگاه 4 کاناله ،6 و یا 9 کاناله میباشد که معمولا سیستم 4 کاناله برای کنترل وضعیت هواپیما در کانال سمت وکانال عرض وکانال طولی است و یک کانال برای دسته گاز است که با این 4 دستور میتوان پهباد را کنترل نمود لازم به ذکر است که سخت ترین و حساس ترین فاز در زمینه ی کنترل پهباد فاز نشست و برخواست است در شکل 6 سیستم رادیو کنترل 9 کاناله نمایش داده شده است که کانالهای دیگر میتوانند دستور باز بسته کردن چرخها و دستور تغییر دهانه بال
و زاویه عقبگرد و غیره را عهده دار باشد. در مورد انواع فرستنده می توان به مدل 72 مگاهرتزی که مدل قدیمی تر ان است اشاره نمود . این مدل دارای مشکلاتی چون تداخل امواج در هنگان روشن کردن را داراست مدل جدید تر ان مدل 2.4 گیگاهرتزی است که بخاطر قابلیت های تعبیه شده مشکل تداخل امواج در ان حل شده است و از خروجی رادیو ها عدد سروو ها را بگیریم و از اتو پایلوت در ایستگاه زمینی استفاده کنیم (توضیح حالت تک لینکه) در اکثر فرستنده های رادیویی تعداد سروو هایی که می توانیم فرمان بدهیم الویتور،الرون ، ،تراتل و رادر است و در منو میتوان تعریف کرد که هر کدام از کلید ها چه کاری را انجام دهند (شکل6) معموله استیک چپ به سمت بالا پایین و چپ و راست مانند استیک راست تواایی حرکت را دارد. محورعمودی استیک چپ معمولا تراتل (دسته گاز) و محور افقی آن معمولا رادر است و استیک راست در راستای محور عمودی معمولا الویتور و محور افقی آن آیلرون است. بقیه کلید ها برحسب نباز قابل برنامه ریزی است که دستوراتی مانند چتر نجات و باز وبسته کردن چرخها و … به آن داده شود.در حالتهای مفروض میتوان به این امر اشاره نمود که در پهپاد ها و هواپیماها و وظیفه تولید ممان ها و گشتاور های آیرودینامیکی مانند شکل (6ب) است که رادر برای یاو الویتور برای پیچ و الرون برای بنک است.
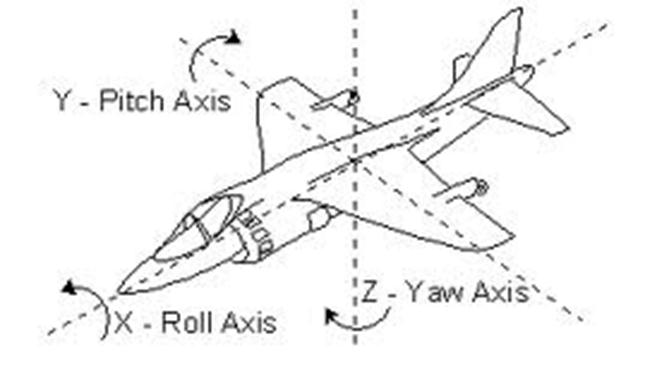
(شکل 6 ب) شماتیک شکلی نیروها و ممان های وارد بر پهپاد یا هواپیما
2-2-2- گیرنده و فرستنده :
گیرنده که درشکل 7 نمایش داده شده است بر روی پهباد نصب میشود و بعد از ان دیتا ها را از رادیو کنترل در یافت کرده و انها را بصورت پالس دیجیتالی به اتو پایلوت می دهد.

شکل7- برد گیرنده و فرستنده سیستم اتو پایلوت
همانطور که در شکل 7 نشان داده شده است برد سیستم گیرنده دارای یک آنتن و و یک سیم است که بوسیله انتن اطلاعات را در یافت و به وسیله سیم انها را به اتو پایلوت می دهد در واقع این برد وظیفه ی تقویت سیگنالهای ورودی و خروجی را داراست و این سیستم واسط بین پرت ورودی از رادیو کنترل و پرت خروجی از اتو پایلوت است.
2-2-3- سروو :
این قطعه دارای 3 سیم است و داخل ان گیربکسی وجود دارد که وقتی دستورچرخش به ان داده میشود چرخیده به طوری که خلاصی ندارد و احتیاج به کنترل ان نیست مثلا اگر دستور چرخش 5 درجه ای را به داده شود احتیاج به کنترل ان برای جلوگیری از گذر 5 درجه نیست به عبارت دیگر دستوری برای ایستادن لازم ندارد.
در داخل سیستم سروو گیربکس هایی وجود دارد که حرکت سروو را کند(در اصطلاح امیانه خشک) میکند و چرخش چرخدنده ی ان خشک است این سیستم در( شکل 8) با دو نما نمایش داده شده است. تمامی اجزا ی ذکر شده تا اینجا اصلی ترین بخش های یک سیستم رادیو کنترل است.


شکل 8- موتور سروو
از این قسمت به بعد به بحث در مورد سیستم اتو پایلوت میپردازیم.
3- اتو پایلوت:
مهمترین مشکل سیستم رادیو کنترل محدودیت کاربرد ان در محدوده ی بصری است یعنی برای تشخیص پارامتر های پرواز پهباد باید در میدان دید خلبان باشد از طرفی همانطور که در بخش سیستمهای رادیو کنترل اشاره شد تشخیص پارامترهای پرواز خلبان ماهری را می خواهد.برای حل کردن این مشکل و آگاهی از وضعیت پهباد از سیستم اتو پایلوت کمک میگیریم.
3-1- معرفی اجزای سیستم اتو پایلوت:
1- ایستگاه زمینی
2- کیت اتو پایلوت
3- سنسورهای اتو پایلوت
4- سروو های اتو پایلوت(عملگرها)
—————————————————————————————–
فهرست:
فصل1- مقدمه
1-1- انواع دسته بندی هواپیماهای مدل(پهپاد)
1-2- دسته بندی پهپادهای مدل از نظرنوع موتور
1-3- دسته بندی نوع کیتهای هواپیمای موجود در بازار جهانی
فصل2- پهپاد های رادیو کنترل
2-1- پهپاد های رادیو کنترل در ایران
2-2 – اجزای سیستم رادیو کنترل
فصل 3- اتوپایلوت
3-1- معرفی اجزای سیستم اتوپایلوت
3-2- کارهایی که قبل از نصب سیستم اتو پایلوت باید انجام شود
3-3- طراحی اتوپایلوت
3-4- معرفی بلوکهای اتوپایلوتی پرکاربرد در مقالات و بیان تفاوت آنها
3-5- ایجاد سخت افزار
3-6- تست سخت افزار در حلقه
فصل4- نتیجه گیری
4-1- پیشنهاد ها
فصل5- منابع ومراجع
این گزارش در 93 صفحه تنظیم شده است. فایل PowerPoint نیز در 22 اسلاید آماده شده است.
—————————————————————————————————————–
قیمت: 250 هزار تومان
اطلاعات بیشتر:
Info@EngPedia.ir
یا از طریق فرم تماس با ما
مطالب مرتبط
برچسب ها : اتوپایلوت, پروژه هوافضا, سیستم اتوپایلوت, نصب اتوپایلوت, نصب و راه اندازی سیستم اتوپایلوت بر روی هواپیمای بدون سرنشین, هواپیمای بدون سرنشین
دیدگاهتان را بنویسید
نشانی ایمیل منتشر نخواهد شد
تعداد 2 دیدگاه برای نوشته " نصب و راه اندازی سیستم اتوپایلوت بر روی هواپیمای بدون سرنشین" ارسال شده است .

مطالب جدید
- دیتابیس جامع مواد اپتیکی
- نرم افزار Milestone XProtect 2024 R2 نظارت بر دوربین امنیتی
- نرم افزار LightTools 2024.09 طراحی سیستمهای نوری
- نرم افزار Rsoft 2024.09 شبیه سازی فوتونیکی و اپتیک
- نرم افزار CODE V 2024.09 طراحی و شبیه سازی اپتیکی
- نرم افزار ImSym 2024.09 شبیهسازی سیستم تصویربرداری
- نرم افزار INSUL v10 2024 تحلیل عملکرد عایق صوتی
- نرم افزار SPACE GASS v14.2 2024 طراحی و تحلیل سازه
- نرم افزار CHECKWIND v8.1.6 2024 تحلیل بار باد
- نرم افزار CHECKSTEEL v4.1.6 2024 طراحی و تحلیل سازههای فولادی

مطالب پربازدید

مطالب تصادفی
- دانلود 200 تولباکس کاربردی MATLAB
- Spark Plasma Sintering
- نرم افزار OrcaFlex 11.4c 2024 تحلیل و شبیهسازی فراساحلی
- فیلم آموزشی ABAQUS (فارسی) مبتدی
- دانلود نسخه پرتابل Delphi
- نرم افزار تحلیل خستگی FEMFAT
- نرم افزار ComposiCAD 24.7 2024 طراحی پیچش الیاف مخازن کامپوزیتی
- نرم افزار ISTRAM ISPOL 2023 طراحی، مدیریت و اجرای پروژههای حمل و نقل
- نرم افزار MSC Mvision Builder and Evaluator مدیریت دادههای خواص مواد
- مجموعه هندبوک مواد کامپوزیت (Composite)

شبکه های اجتماعی
دانشنامه تخصصی مهندسی ایران را در شبکه های اجتماعی دنبال کنید


همکاران ما






سلام
من کجا می تونم حضوری شما رو ببینم تا از نحوه ی خرید این تجهیزات برای ساخت پهپاد مدل از شما راهنمایی بگیرم
از طریق فرم تماس با ما اقدام نمایید.