چاپ سه بعدی جهت درمان کوتاه شدگی اندامها
- 1400/10/07
- 2 دیدگاه
درمان ناهنجاریهای چند وجهی، به خصوص در کودکان کوچکتر نیاز به ساخت یک فیکساتور الیزاروف پیچیده با ابعاد غالباً کوچک دارد. هدف از این مطالعه بررسی کاربرد بالینی مدل چاپ شده سه بعدی استخوان در درمان با روش الیزاروف است.
روشها
این مطالعه شامل یک کودک ۶ ساله بود که در معاینه بالینی و رادیولوژی، ناهنجاری چند وجهی پای راست را نشان داد. سپس مدلهای سه بعدی استخوانهای جداگانه به روش ساخت افزایشی چاپ شدند و به عنوان داربست برای نصب ابزار الیزاروف مورد استفاده قرار گرفتند. ما برای مقایسه اصلاح محوری و افزایش طول مورد انتظار و واقعی، سه بار جهت گیری مکانی قطعات استخوانی را اندازه گیری کردیم. اصلاح محوری و افزایش طول واقعی با یک روش فوتومتریک مشخص شدند.
نتایج
فیکساتور الیزاروف با یک پیکربندی توسعه یافته با استفاده از یک مدل سه بعدی استخوان درمان شده، روی پای بیمار قرار داده شد. کورتیکوتومی در نزدیکی مبدأ پهنه استخوان درشت نی راست به همراه استئوتومی در تالوس راست انجام شد. این درمان منجر به افزایش طول ۵/۳ سانتیمتری اندام و تصحیح ۷ درجهای زاویه والگوس (برون کژی) شد. مقادیر افزایش طول و اصلاح محوری واقعی ۱/۴٪ کمتر از مقادیر مورد انتظار برای این پارامترها بود.
تفسیر نتایج
پزشکان ارتوپد باید تفاوت بین افزایش طول و اصلاح محوری مورد انتظار و واقعی را در مورد برنامه ریزی درمان با روش الیزاروف در نظر بگیرند. چاپ سه بعدی، یک فناوری سودمند است که میتواند برای پشتیبانی از درمان با روش الیزاروف استفاده شود.
چاپ سه بعدی جهت درمان کوتاه شدگی اندامها
- مقدمه
روش الیزاروف به طور فزایندهای در سراسر جهان و همچنین در مدیریت ناهنجاریهای پیچیده چند وجهی در کودکان و بزرگسالان مورد استفاده قرار میگیرد. به علت پیشرفتهای این روش، پزشکان ارتوپد تمایل دارند که از آن همچنین در کودکان خردسال تر و از جمله بیماران دارای ناهنجاریهای چند وجهی و کوتاه شدگی قابل توجه اندام استفاده کنند. با این حال، درمان ناهنجاریهای چند وجهی به ویژه در کودکان خردسال تر نیازمند ساخت یک فیکساتور الیزاروف پیچیده است و غالباً ابعاد کوچکی دارد. دستگاهی با چنین خصوصیاتی نیاز به مونتاژ و نصب مناسب دارد و استفاده از آن با افزایش خطر عوارض همراه است. به واسطه پیشرفت در فن آوری های ساخت افزایشی، میتوان از این مشکلات احتمالی جلوگیری کرد.
استفاده از یک مدل چاپی سه بعدی از استخوان درمان شده میتواند در مرحله برنامه ریزی پیش از عمل مفید باشد. در بسیاری از زمینههای پزشکی نمونههایی از برنامه ریزی پیش از عمل با کمک مدلهای استخوانی چاپ شده یافت میشود. Mobbs و همکارانش موارد استفاده از چاپ سه بعدی را برای طراحی صفحه تثبیت قسمتهای گردنی ستون فقرات پس از جراحی برداشتن تومور و بازسازی بخشی از ستون فقرات گردنی شرح دادند. نویسندگان تأکید میکنند که برنامه ریزی پیش از عمل براساس مدلهای سه بعدی امکان قرارگیری بهتر ایمپلنت و زمان جراحی کوتاهتری را نسبت به روش متداول فراهم میکند. Kim و Kyung موردی از کاربرد مدلهای استخوان درمان شده که با استفاده از روش افزایشی برای برنامه ریزی استئوتومی پشت زانویی ساخته شدهاند را شرح دادند.
همچنین در این مورد، نویسندگان نسبت به روش قدیمی بر دقت بیشتر و زمان جراحی کوتاهتر تأکید میکنند. وانگ و همکارانش ضمن بحث در مورد نتایج مشاهدات آنها خاطرنشان کردند که استفاده از مدلهای استخوان درمان شده که برای برنامه ریزی عمل جراحی باعث دقت بیشتر در برش و بازسازی سطح مفصل زانو میشود، امکان دستیابی به بالاترین شباهت ساختار بیولوژیکی به سطح بازسازی شده مفصل زانو را فراهم میکند و به طور قابل توجهی دامنه حرکت زانو را بعد از جراحی افزایش میدهد. در عین حال، آنها تأکید میکنند که تفاوت قابل ملاحظهای در طول مدت عمل مشاهده نمیکنند. با این حال در واقعیت، از دست دادن خون، طول برش و درصد عوارض به طور قابل توجهی پایینتر از مواردی بودند که در گروه کنترل مشاهده شد که نشان میدهد استفاده از یک مدل استخوان چاپ شده سه بعدی میتواند باعث کاهش آسیبهای جراحی شود.

شکل 1 – عکس x-ray، CT، مدل دیجیتالی سه بعدی و مدل چاپ شده سه بعدی با فیکساتور الیزاروف نصب شده
نمونه دیگر، جراحیهای حنجرهای هستند. Somijan و همکاران استفاده از مدلهای سه بعدی ساخته شده با روش افزایشی را برای برنامه ریزی پروسه تقویت سینوس با استفاده از یک ایمپلنت شرح دادند. در بررسی یافتههای آنها، نویسندگان تأکید میکنند که برنامه ریزی دقیق پیش از عمل برای جراحیهای حنجرهای بسیار مهم است. یک ابزار ارزشمند در این مورد، یک مدل سه بعدی است که امکان شبیه سازی پیش از عمل را فراهم میکند و این به زمانهای جراحی کوتاهتر، کاهش خطر عوارض حین عمل و کاهش ریسک خطا منجر میشود. اگرچه چاپ سه بعدی به طور فزایندهای در ارتوپدی استفاده میشود، با توجه به معلومات ما هیچ گزارش منتشر شدهای در مورد کاربرد آن در درمان با روش الیزاروف وجود ندارد.
ما در مقاله قبلی با استفاده از یک مدل استخوان سه بعدی تولید شده به کمک فن آوری مدل سازی لایه ذوبی (FDM)، عملاً سودمندی چاپ سه بعدی را در این کاربرد اثبات کردهایم. این امر به ما این امکان را میدهد تا به طور جامعی هندسه استخوانهای تغییر شکل یافته را به عنوان بخشی از آماده سازی برای درمان جراحی مناسب مورد تجزیه و تحلیل قرار دهیم. نتایج امیدوار کننده این مطالعه ما را به راستی آزمایی کاربرد عملی مدل سازی سه بعدی استخوان در یک محیط بالینی ترغیب میکند. ما فرض را بر این قرار دادیم که استفاده از یک مدل استخوان چاپ شده سه بعدی میتواند برای بیمار ما به ویژه در موارد تسهیل ساخت یک فیکساتور ایلیزاروف سفارشی و شناسایی مکانهای مناسب برای درج سیمهای Kirschner و پیچهای Schanz بسیار مفید باشد.
علاوه بر این ما از این مدل برای بررسی افزایش طول و اصلاح محوری واقعی به دست آمده در بیمار برای مقایسه با مقادیر مورد انتظار این پارامترها استفاده کردیم. در نهایت ما آزمایش کردیم که آیا استفاده از مدل سه بعدی منجر به مدت زمان کوتاهتر و عوارض درمانی کمتری با روش الیزاروف شده است. هدف از این مطالعه بررسی کاربرد بالینی مدل استخوانی چاپ شده سه بعدی در درمان با روش الیزاروف است.

مواد و روشها
این مطالعه شامل یک کودک 6 ساله بود که در معاینه بالینی و رادیولوژی، ناهنجاریهای چند وجهی پای راست را نشان داد: هیپوپلازی نازک نی، ناهنجاری استخوان درشت نی، کوتاه شدگی و ناهنجاری والگوس ساق پا و ناهنجاریهای پیچیده مچ پا و پا. کسب و استفاده از اطلاعات اسکن سی تی اسکن بیمار برای بازسازی تصاویر سه بعدی ساختارهای استخوانی انتخاب شده، توسط کمیسیون بیولوژیک دانشگاه علوم پزشکی وروکلاو تأیید شد.
پس از حذف آرتیفکتها و هموارسازی مکانی با کمک فیلترهای موجود در بسته نرم افزار، تصاویر به صورت فایلهای .stl ذخیره شدند (شکل 1) سپس، مدلهای سه بعدی استخوانهای جداگانه با استفاده از روش ساخت افزایشی چاپ شدند و به عنوان داربست برای نصب ابزار الیزاروف مورد استفاده قرار گرفتند (شکل 1). اجزای پایه پلی لاکتیک اسیدی (PLA) مدل با یک دستگاه 3D Builder با استفاده از فناوری مدل سازی لایه ذوبی چاپ شدند. پارامترهای فیزیکی مدل سه بعدی مانند ضخامت پوسته (8/0 میلیمتر) ، ضخامت لایه (2/0 میلیمتر) و نوع و درجه پر شدن (30٪) با کمک نرم افزار چاپگر سه بعدی مشخص شدند. از همان نرم افزار برای طراحی سیستم عناصر پشتیبان تثبیت کننده مدل در طول چاپ استفاده شد. این عناصر پیش از استفاده از مدل حذف شدند.
پیکربندی فضایی دستگاه الیزاروف بر اساس دانش ما و سالها تجربه انتخاب شده است. ساخت دستگاه براساس برنامه درمان و میزان اصلاح مورد انتظار تنظیم شد. دستگاه الیزاروف شامل حلقهای ثابت شده در نزدیکی مبدأ استخوان درشت نی با 3 سیم Kirschner، حلقهای ثابت شده در میانه درشت نی با 2 سیم Kirschner، حلقهای ثابت شده دور از استخوان درشت نی و نازک نی با 2 سیم Kirschner و حلقه U شکل پا که به استخوان پاشنه با دو سیم Kirschner با قلع و به قسمت انتهایی اولین استخوان کف پا با 1 سیم Kirschner با قلع متصل شده است (شکل 1)، میباشد.
دو مکانیسم لولا (میلههای نخ کشی شده با یک لولا، فراهم آورنده محور چرخش برای قطعات استخوانی، قرار داده شده در نزدیکی محور بلند اندام) و دو منحرف کننده (میلههای نخ کشی شده بلند، قرار داده شده در فاصله دور از محور بلند اندام) بین حلقه نزدیک به مبدأ استخوان و حلقه میانی فیکساتور نصب شده بودند. کورتیکوتومی در نزدیکی مبدأ پهنه استخوان درشت نی انجام شد.
در این مطالعه، پیش از درمان مناسب با روش الیزاروف، ما یک روش اصلاحی شبیه سازی شده را با نصب فیکساتور روی یک مدل استخوانی سه بعدی اجرا کردیم. این به ما این امکان را میدهد تا جهت گیری مکانی دستگاه را پیش از نصب آن روی بیمار بهینه کنیم. برای معالجه بیمار یک دستگاه الیزاروف پیچیده مناسب برای کنترل حرکت قطعه استخوانی حین افزایش طول و اصلاح محوری ساختهایم. شبیه سازی با مدل سه بعدی ما را قادر ساخت تا چگونگی تأثیر گذاشتن تغییرات در ساخت فیکساتور الیزارارف بر حرکت قطعات استخوان را تجزیه و تحلیل کنیم زیرا افزایش طول و اصلاح محوری واقعی لزوماً مشابه مقادیر مورد انتظار این پارامترها نیستند.
برای مقایسه افزایش طول و تصحیح محوری واقعی و مورد انتظار، ما جهت گیری مکانی قطعات استخوانی را سه بار اندازه گیری کردیم: بار اول پیش از تصحیح، به عنوان مثال در موقعیت پایه (d0∆)، بار دوم پس از یک اصلاح 4 میلیمتری درمکانیسمهای لولا و یک اصلاح 8 میلیمتری در منحرف کنندهها (d1∆) و بار سوم پس از یک اصلاح 8 میلیمتری در مکانیسمهای لولا و یک اصلاح 16 میلیمتری در منحرف کنندهها (d2∆) و پس از یک اصلاح 12 میلیمتری در مکانیسمهای لولا و یک اصلاح 24 میلیمتری در منحرف کنندهها (d3∆) (شکل 2).

شکل 2 – طرح کلی نشان دهنده تعیین اصلاح محوری مورد انتظار (a)، (c) و افزایش طول (b).
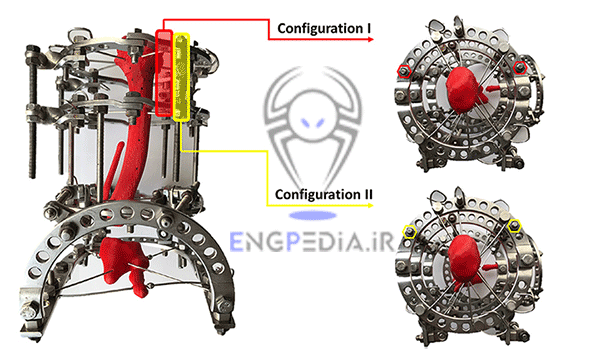
شکل 3 – پیکربندیهای فضایی انتخاب شده فیکساتور الیزاروف: پیکربندیهای I و II با انحراف به سمت لولاهای میانی
علاوه بر این ما پیکربندی دیگری از فیکساتور را مورد بررسی قرار دادیم که به علت اینکه اولین ترکیب بندی، افزایش طول و تصحیح محوری مورد انتظار را برآورده نکرد، ساخته شد. دو ترکیب بندی طراحی شده دستگاه الیزاروف در موقعیت لولاها متفاوت بودند.
در پیکربندی دوم، لولا یک موقعیت (حلقه دیافراگم بعدی) جابهجا شده است (شکل ۳). در هر دو پیکربندی حداکثر افزایش طول برای لولاها، ۱۲ میلیمتر و برای میلههای جابهجایی، ۲۴ میلیمتر بود. همچنین، در پیکربندی دوم یک اندازه گیری اضافی با لولاهای طویل شده ۱۵ میلیمتری و میلههای جابهجایی طویل شده ۳۰ میلیمتری انجام شد. هدف از این اندازه گیری دوم نشان دادن تأثیر تغییرات پیکربندی فضایی در افزایش طول و تصحیح محوری قطعات استخوانی بود. اصلاح محوری و افزایش طول واقعی با یک روش فوتومتریک مشخص شدند.
نتایج
استفاده از مدل استخوانی سه بعدی که با استفاده از فناوری FDM چاپ شده است، ما را قادر میکند تا برای درمان مناسب آماده شویم، مکانهای استئوتومی و مکانهای درج سیمهای Kirschner و پیچهای Schanz را مشخص کنیم، فیکساتوری با پیکربندی فضایی مناسب طراحی کنیم و اختلافات بین افزایش طول و اصلاح محوری مورد انتظار و واقعی را بررسی کنیم.

شکل ۴ – اصلاح و افزایش طول: ۴ میلیمتر در مکانیسمهای لولا و ۸ میلیمتر در منحرف کنندهها، ۸ میلیمتر در مکانیسمهای لولا و ۱۶ میلیمتر در منحرف کنندهها، ۱۲ میلیمتردر مکانیسمهای لولا و ۲۴ میلیمتر در منحرف کنندهها، همراه با مقادیر واقعی اصلاح محوری و افزایش طول

جدول 1 – حرکت قطعات استخوانی [mm] و تغییرات در محور آناتومیکی [°] در پیکربندیهای مختلف
با توجه به موارد فوق، درمان مناسب با روش الیزاروف در سه مرحله انجام شد: (1) برای ترکیب بندی اول دستگاه الیزاروف: یک تصحیح 12 میلیمتری در مکانیسمهای لولا و یک تصحیح 24 میلیمتری در منحرف کنندههای به دست آمده در مراحل در d0∆ تا d3∆ (شکل 4)، (2) برای ترکیب بندی دوم دستگاه الیزاروف: یک تصحیح 12 میلیمتری در مکانیسمهای لولا و یک تصحیح 24 میلیمتری در منحرف کنندهها (d3∆) و (3) برای ترکیب بندی سوم دستگاه الیزاروف: یک تصحیح 15 میلیمتری در مکانیسمهای لولا و یک تصحیح 30 میلیمتری در منحرف کنندهها (d3∆).
حرکت قطعات استخوانی به صورت فوتومتری (نوری) کنترل شد (شکل 4). تغییرات در محور آناتومیکی استخوان درشت نی براساس جهت گیری متقابل قطعات استخوانی ثبت شد (شکل 2). نتایج در جدول 1 نشان داده شده است. فاصله مشاهده شده بین قطعات استخوانی در پیکر بندی دوم بیشتر از پیکر بندی اول بود (برای هر دو اصلاح در پیکربندی دوم). حرکت لولاهای (پیکربندی II) و اعمال اصلاحات مشابه با پیکربندی I در لولاها و میلههای جابهجایی، اصلاح محوری را کاهش داد. اما افزایش اصلاحات در لولاها و میلههای جابهجایی، اصلاح محوری را افزایش داد.
پیش از جراحی، فیکساتور الیزاروف روی استخوانهای چاپ شده نصب شد. پیکر بندی دوم (30/15) فیکساتور انتخاب شد چرا که برای این پیکربندی اصلاح محوری به اصلاح مورد انتظار نزدیکترین میزان بود. این مورد امکان این را به ما داد که افزایش طول و اصلاح مورد نظر استخوان را در بیمار خود به دست آوریم. پس از ساخت دستگاه الیزاروف، کورتیکوتومی در نزدیکی مبدأ پهنه استخوان درشت نی راست به همراه استئوتومی تالوس راست انجام شد (شکل 5). بیمار برای 165 روز دستگاه الیزاروف را دربر داشت. درمان منجر به افزایش طول 5/3 سانتیمتری اندام و تصحیح 7 درجهای از زاویه والگوس که مطابق با شاخص افزایش طول 14/47 days/cm و شاخص اصلاح 5/23 days/degree بود. در طول دوره درمان هیچ عارضهای ثبت نشد.
بحث
چاپ سه بعدی، با توجه به محبوبیت روزافزون آن در حال سادهتر، دقیقتر و ارزانتر شدن است که منجر به کاربرد گسترده آن در پزشکی، از جمله در درمان با روش الیزاروف شده است. با این حال با توجه به معلومات ما، هیچ یک از مطالعات قبلی کاربرد بالینی چاپ سهبعدی در روش الیزاروف را تأیید نکرده یا از مدلهای استخوانی سه بعدی برای بررسی اختلافات بین اصلاح محوری و افزایش طول مورد انتظار و واقعی استفاده نکرده است. رادیوگرافیهای معمول و تصاویر سه بعدی بازسازی شده بر اساس CT اسکن ممکن است به طور دقیقی روابط آناتومیکی داخل اندام تغییر شکل یافته را منعکس نکنند.
این مشکل را میتوان با استفاده از فناوری چاپ سه بعدی که بازسازی بسیار دقیقی را از ساختارهای اسکلتی، ابعاد واقعی آنها و هندسه فضایی ارائه میدهد، برطرف کرد. شواهد منتشر شده نشان میدهد که تنظیم مکانی سازه فیکساتور در مورد تغییر شکل استخوان و نصب مناسب آن برای کسب نتیجه موفقیت آمیز درمان با روش الیزاروف بسیار مهم است. استفاده از یک مدل سه بعدی ما را قادر ساخت تا دستگاه الیزاروفی را طراحی کنیم که پیکربندی فضایی آن مطابق با ابعاد استخوان و درجه ناهنجاری آن تنظیم شده باشد. همچنین هندسه فضایی مناسب سیمها و پیچها، عامل تعیین کننده مهمی در نتیجه درمان است زیرا باعث ثبات کافی فیکساتور الیزاروف میشود.
ما توانستیم با استفاده از مدل سه بعدی، هندسه فضایی سیمهای Kirschner و پیچهای Schanz را در بهترین وضعیت قرار دهیم. علاوه بر این، پیش از درمان مناسب، ما یک اصلاح شبیه سازی شده را با استفاده از دستگاه الیزاروف نصب شده روی مدل استخوانی سه بعدی انجام دادیم. این به ما این امکان را میدهد تا جایگذاری مکانیسمهای لولا و منحرف کنندهها را به طور بهینه تنظیم کنیم.
هدف از مطالعه ما بررسی صحت فرضیات درمانی و ارزیابی افزایش طول و اصلاح محوری مورد انتظار با کمک مدل استخوان سه بعدی به منظور بهینه سازی نتیجه درمان مناسب و کوتاه کردن مدت زمان آن بود. درمان ناهنجاریهای استخوانی با استفاده از روش الیزاروف یک فرآیند چند مرحلهای است. نتایج حاصل از اصلاح آزمایشی با استفاده از مدلهای استخوان چاپ شده سه بعدی، به پزشک و بیمار اجازه میدهد تا بر صحت درمان نظارت داشته باشند.

شکل 5 – بیمار طی اصلاح محوری و افزایش طول (b) ،(a) و نتیجه نهایی درمان (d) ،(c).
تجزیه و تحلیل نتایج نشان میدهد که حتی تغییرات کوچک در دستگاه نیز تأثیر قابل توجهی بر اصلاح دارد. استفاده از یک مدل استخوان چاپ شده و انجام یک اصلاح آزمایشی بر روی چنین مدلی ممکن است در انتخاب دقیقتر ساختار فضایی برای نیازهای یک بیمار خاص نقش داشته باشد. علاوه بر این، این مدل استخوان میتواند به عنوان یک مدل آموزشی برای تسهیل ارتباط بین پزشک و بیمار به کار رود. پزشک میتواند به طور دقیق روند برنامه ریزی شده درمان را به بیمار توضیح و به شکل واضحی نشان دهد.
تجزیه و تحلیل نتایج تجربی نشان میدهد که پیکربندی اول میتواند به دستیابی اصلاح محوری بهتر استخوان کمک کند. در مقابل، پیکربندی دوم امکان افزایش طول بیشتری را در کنار اصلاح محوری کمتر فراهم میکند. استئوتومی استخوانها نسبت به قسمت میانی بیشتر در نزدیکی مبدأ استخوان انجام شد زیرا این قسمت از درشت نی یعنی در نزدیکی مبدأ پهنه استخوان دارای استخوان سازی بهتری است. برای افزایش طول و اصلاح محوری، در صورت عدم وجود ناهنجاریهای زیاد استخوانها، استئوئومی به طور معمول در نزدیکی مبدأ پهنه استخوان درشت نی انجام میشود تا بازسازی بهتری از استخوان حاصل شود.
در طول درمان، نتایج به دست آمده از بیماران با نتایج تجربی به دست آمده از مدل چاپ شده مقایسه شد. بین مقدار اصلاح در آزمایشگاه برای سنجش مدل اسکلتی (اصلاح 3/7 درجه) و تنظیم 5/7 درجهای زاویه والگوس بیمار اختلاف کمی وجود داشت. این ممکن است به این دلیل باشد که درمان بیمار طولانی بوده و بیمار یک کودک بود. پروسه درمان میتواند توسط مقادیر افزایش یافته کوتاه شدگی و تغییر شکل محوری ناشی از روند رشد طبیعی بیمار تحت تأثیر قرار گیرد. در این مورد توصیف شده، اصلاح والگوس و افزایش طول برای پزشکان رضایت بخش و مطابق با برنامهها بود.
مطالعه ما اثبات کرده است که مقادیر افزایش طول و اصلاح محوری واقعی کمتر از مقادیر مورد انتظار این پارامترها است. این مورد ممکن است ناشی از ساختار پیچیده فیکساتور یا ناشی از سست شدن پیچ و مهرهها طی اصلاح و انحراف محور باشد. تفاوت بین مقادیر مورد انتظار و واقعی افزایش طول و اصلاح محوری ممکن است دلایل دیگری داشته باشد، مانند نیروهای واکنش بافتهای نرم بلند، تفاوت بین هندسه فیکساتورهای خارجی نصب شده روی مدل و بیمار (به عنوان مثال زاویه نفوذ سیمهای Kirschner به داخل استخوان) و دقیق نبودن جاگذاریهای روزانه انجام شده توسط بیمار. مزایای ذکر شده مربوط به کاربرد چاپ سهبعدی به عنوان یک فناوری پشتیبان درمان با روش الیزاروف توسط مدت زمان کوتاه تر درمان و عوارض کمتر آن منعکس شده است. در مجموع، این منجر به نتیجه بهتر در یک کودک خردسال دارای ناهنجاری پیچیده و کوتاه شدگی ساق پا و پا شد.
نتیجه گیری
در مورد کاربرد بالینی چاپ سه بعدی به عنوان یک فناوری پشتیبان درمان با روش الیزاروف، به خصوص اصلاح اندامهای فوقانی و ناهنجاریهای ران، نیاز به تحقیقات بیشتری است. در مقاله، نمونههای بسیار بیشتری از کاربرد چاپ سه بعدی به عنوان ابزار پشتیبان در آماده سازی پیش از عمل، شبیه سازیهای تثبیت ستون فقرات و عمل جراحی اصلاحی در ناحیه جمجمه و صورت وجود دارد. نویسندگان امکان گسترش کاربرد این روشها را از طریق پشتیبانی از برنامه ریزی برای درمان ناهنجاری استخوان اندام با استفاده از روش الیزاروف به منظور بهبود کیفیت درمان نشان میدهند.
اما محدودیتهایی نیز در این مطالعه وجود دارند از جمله طراحی کنترل نشده و اندازه کوچک نمونه که برای تحلیل آماری کافی نیست. هدف ما جلب توجه متخصصان به امکان استفاده از فناوری چاپ سه بعدی برای پشتیبانی از برنامه ریزی درمان ناهنجاریهای استخوانهای بلند و نشان دادن مزایای ناشی از آن بود. پزشکان ارتوپد باید تفاوتهای بین افزایش طول و اصلاح محوری مورد انتظار و واقعی را در برنامه ریزی درمان با روش الیزاروف در نظر بگیرند. روش چاپ سه بعدی به طور معمول برای پشتیبانی از درمان با روش الیزارف استفاده نمیشود و پزشکان باتجربه نیز میتوانند مستقیماً عمل جراحی را انجام دهند؛ بنابراین میتوان گفت این روش برای پزشکان جوانتر یا کم تجربهتر سودمند است.
مطالب مرتبط



برچسب ها : 3d print, 3d printing, ارتوپد, استخوان, افزایش طول استخوان, افزایش طول قد, الیزاروف, پرینت سه بعدی, پزشکی, چاپ سه بعدی, رادیولوژی, فیکساتور, ناهنجاری چند وجهی
دیدگاهتان را بنویسید
نشانی ایمیل منتشر نخواهد شد

مطالب جدید
- IEDScout 5.22 پایش و عیب یابی IED در شبکه
- TINA 16 تحلیل مدار آنالوگ، دیجیتال، MCU و مختلط
- EMD energyPRO 5 تحلیل سیستم های انرژی
- ADAPT PT/RC 23.0.1 تحلیل غیرخطی تیر و سازه بتنی
- RISA Section 2.1.1 تحلیل مقاطع فولادی و سازه ای
- vMix 29 تولید و پخش زنده حرفه ای
- Ampsa ADW v24 طراحی تقویتکننده RF
- Ampsa MW v24 طراحی شبکه تطبیق امپدانس RF
- DSS Professional 8.7 مدیریت و نظارت تصویری هوشمند
- PowerACOUSTICS 2026 تحلیل آکوستیک و نویز در طراحی صنعتی

مطالب پربازدید
- دانلود کتاب هیدرولیک و پنوماتیک فستو Festo فارسی
- دانلود استاندارد
- دانلود نرم افزار کلید فولاد (Key to Steel) پرتابل
- دانلود فول استاندارد ASTM بصورت رایگان
- آموزش میکروکنترلر AVR
- دانلود آنتی ویروس شورتکات (Back 2 Normal)
- دانلود جدول استاندارد DIN
- دانلود کتاب آموزش Abaqus (فارسی)
- دانلود نرم افزار MATLAB برای آندروید(MATLAB Android)
- فول استاندارد ASME (بروز)

مطالب تصادفی
- AVEVA System Platform 2025 کنترل فرآیندهای صنعتی
- MAXQDA 2025 تحلیل کیفی و ترکیبی پیشرفته
- QNX SDP 8 پلتفرم توسعه سامانه های بلادرنگ (RTOS)
- نرم افزار Datamine EPS 3.1 2025 برنامه ریزی پیشرفت معادن
- نرم افزار Enerplot تحلیل دادههای شبیهسازی شده و اندازهگیری شده
- Cadmatic Plant Design 2025 طراحی سهبعدی کارخانه
- DELFTship 17.30 طراحی و تحلیل پیشرفته کشتی
- آموزش تحلیل پایداری زمین لغزش
- مجموعه نرم افزارهای مهندسی شماره دو
- مجموعه نرم افزارهای مهندسی شماره چهار

شبکه های اجتماعی
دانشنامه تخصصی مهندسی ایران را در شبکه های اجتماعی دنبال کنید


