سونار
7735 بازدید
- 1393/02/02
- 4 دیدگاه
عناوين:
-
1. تاريخچه
-
2. سونار فعال ( active sonar)
-
2.1 آناليز داده هاي سونار فعال
-
2.2 سونار و حيوانات دريايي
-
-
3. سونار غير فعال ( passive sonar )
-
3.1 سرعت صوت
-
3.2 شناسايي منبع صدا
-
3.3 نويز (noise )
-
Sonar
سونار در جنگ
فيشرايزهاي اكوستيكي (Fisheries Acoustics)
كاربرد فيشرايزهاي اكوستيكي (Fisheries Applications)
توجه مهم : به علت عدم پيدا كردن معادل هاي فارسي مناسب براي برخي از واژه ها و اصطلاحات انگليسي، واژه مورد نظر عينا تلفظ گرديده و يا معادل فارسي مورد نظر در قسمت واژه نامه توضيح داده شده است.
سونار
سونار (sonar)، ناوبري و تشخيص فاصله توسط صوت ( sound navigation and ranging)، تكنولوژي است كه با استفاده از انتشار صدا در زير آب قادر به شناسايي ديگر ناوها يا كشتي ها است. در انگلستان اين تكنولوژي با نام ASDIC ( 1948) شناخته شده است.
-
تاريخچه :
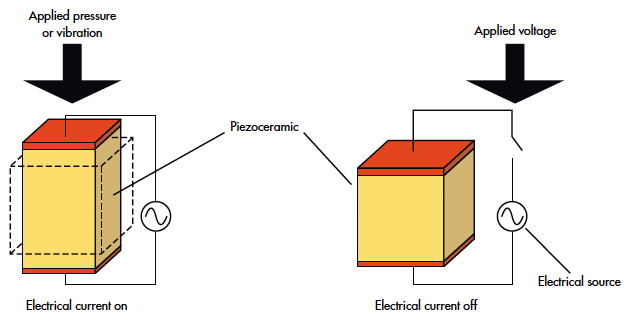
در سال 1906، اولين سونار غير فعال جهت شناسايي توده هاي يخ توسط لوييس نيكسون اختراع گرديد. در جنگ جهاني اول به علت نياز به شناسايي اهداف دريايي تمايل به استفاده از سونار افزايش يافت. پاول دانكوين فرانسوي به همراه كنستانتين چلوسكي روس موفق به اختراع اولين سونار فعال در سال 1915 شدند.اگرچه مبدل هاي پيزوالكتريك نسبت به اين سونار ترجيح داده شدند، اما در جاي خود اين نوع سونارها آينده روشني را در علم رادار شناسي باز كردند.
در سال 1916 زير نظر بخش تحقيقاتي و اختراعات ناوگان دريايي بريتانيا، رابرت بويل ( فيزيكدان كانادايي)، پروژه اي را بر عهده گرفت و با تشكيل كميته تحقيقاتي تشخيص ضدزير دريايي ( يا زيردريايي )،
(anti or alied)) submarine detection investigation committee ) موفق به ساخت نمونه آزمايشي شدند كه با نام مخفف ASDIC شناخته مي شود.
درسال 1918 انگليس و ايالات متحده متفقا موفق به ساخت سيستم هاي مجهز به سونارفعال گشتند، و در سال 1923 توليد اين نوع سيستم ها به طور رسمي آغاز گشت. تكنيك تشخيص نابودگرهاي سيستم هايي كه مجهز به تكنيك ASDIC بودند در سال 1922 ساخته شد.
پس از جنگ جهاني دوم ناوگان آمريكا اقدام به توليد كشتي ها و زير دريايي هاي كه داراي فناوري معروف به ماهي كوچك بودند، كرد.
-
سونار فعال (active sonar)

سونار فعال با ايجاد پالس هاي صوتي (معروف به پينگ)، وسپس گوش دادن به پالس بازگشتي عمل ميكند. براي تشخيص فاصله از هدف، شخص مي تواند مدت زمان بين دريافت و ارسال پالس را اندازه گيري كند. براي اندازه گيري جهت و راستاي هدف مي توان از هيدروفونيك هاي متعدد (hydrofonic) استفاده كرده ،و سپس زمان دريافت پالس توسط هر يك از اين هيدروفون ها را اندازه گرفت، و با مقايسه اين زمان ها به راحتي مي توان جهت و راستاي هدف را تعيين نمود.
پالس ارسالي ممكن است داراي فركانس ثابت بوده يا داراي چهچهه اي(chirp ) از تغييرات فركانس حامل باشد. درحالت دوم ما شاهد تغيير نامطلوب در بسامد حامل موج پيوسته هستيم. و ميتوان از روش فشرده سازي براي دست يابي به سيگنالي با باند باريك و عاري از فركانس هاي نامطلوب استفاده كرد. درعمل هنگامي كه سيگنال ما از نوع چهچهه اي است مدت زمان دريافت سيگنال افزايش ميابد. در نتيجه ما سيگنال دريافتي را با انرژي كمتري نسبت به زماني كه سيگنال ما داراي يك فركانس بود دريافت مي كنيم. در حالت كلي رابطه بين فركانس و مسافت بدين صورت است كه براي مسافت هاي طولاني از فركانس هاي ضعيفتري استفاده مي شود.
در يكي از موارد كاربردي ما از اين سونار به عنوان چراغ قوه استفاده مي كنيم. از يكي از نقاط زير زيردريايي يا كشتي سنسور به درون آب فرستاده شده و مي تواند فواصل خواسته شده را اندازه گيري كند.يگي ديگر از كاربردهاي سونار فعال در شناسايي توده ماهيهاي درون آب است. يكي ديگر از كاربردهاي سونار فعال درعمليات نظامي مي باشد و اين سونار قادر به ايجاد يك تصوير سه بعدي با وضوح بالا ازمحيط اطراف سونار مي باشد.با اين وجود از اين نوع سونار در عمليات جاسوسي مورد استفاده قرار نمي گيرد.درادامه كاربردهاي اين نوع سونار را به طور دقيق تر مورد بررسي قرار مي دهيم.
از سونار فعال مي توان در اندازه گيري عمق دريا استفاده كرد، كه اين عملكرد معروف به عمق سنجي آكوستيكي (echo sounding) است.
از سونارهاي فعال معمولا در اندازه گيري مسافت بين دو پاسخگر (transponder) استفاده ميگردد. پاسخ گر وسيله اي است كه قادر به دريافت و ارسال پالس هاي نوع اول ( فركانس ثابت ) مي باشد.ونيز هنگاميكه اين پاسخ گر پالسي را دريافت مي كند بسته به ميزان انرژي پالس دريافتي از خود عكس العمل نشان ميدهد. براي اندازه گيري مسافت يكي از پاسخ گرها اقدام به توليد پالس مي كند سپس به اندازه گيري مدت زمان ارسال به پاسخگر ديگر و دريافت پالس مي پردازد.حال كافي است تنها سرعت صوت ( پالس ارسالي ) را درون آب بدانيم. يعني در اينجا مدت زمان طي مسافت بين دو پاسخگر اندازه گرفته شده و در سرعت پالس در آب ضرب مي كنيم تا مسافت بين دو پاسخگر بدست آيد. با بكارگيري پاسخگرهاي متعدد ما قادر به شناسايي نسبي موقعيت هاي اجسام ثابت و متحرك درون آب هستيم.
-
آناليز داده هاي سونار فعال

داده هاي كسب شده توسط سونار فعال با اندازه گيري صوت مشخص شده، براي يك پريود زماني كوچك پس از ارسال پينگ، بدست مي آيد. مسافتي كه پالس تا كف دريا يا هر جسمي كه داراي خاصيت بازتابش آكوستيكي ( acoustic reflection) است مي تواند با اندازه گيري زمان سپري شده بين ارسال پالس و تشخيص هدف انجام مي گيرد. ساير ويرگي هايي راكه مي توان از شكل پالس بازگشتي دريافت كرد به صورت زير است :
-
در هنگام ارسال پالس به كف دريا يا اقيانوس، برخي از پالس هاي بازگشتي با برخورد به فصل مشترك بين آب دريا و محيط خارج از آب مجددا بازتاب پيدا مي كنند و براي دومين بار ازكف دريا بازتابيده مي شوند. اين امواج بازگشتي حامل اطلاعاتي است كه بيانگر ميزان خاصيت آكوستيكي آن ناحيه ازكف دريا مي باشد.
-
بسته به ميزان ناهمواري كف دريا ما شاهد زمان هاي متفاوتي از بازكشت پالس ارسالي خواهيم بود. براي زماني كه كف دريا صاف است، اغلب موج هاي بازگشتي در يك مسير باز تابيده ميشوند در نتيجه ما شاهد اطلاعاتي حاكي از وجود گياهان نوك تيز (sharp spike ) دركف دريا هستيم. براي سطوح با ناهمواري بيشتر موج هاي بازگشتي گستره وسيع تري را به خود اختصاص ميدهند، و بعضي از پالس هاي بازگشتي پس از چند بازتابش كه ناشي از ناهمواري سطح كف دريا ميباشد به سونار بازميگردند.درنتيجه كاهش ميزان گياهان نوكتيز در داده ها بيانگر سطح ناصاف كف دريا مي باشد.
سونار وحيوانات دريايي
بعضي از حيوانات دريايي نظير وال ها و دلفين ها، از سيستمي مشابه سيستم سونار ( پژواك مكاني ) جهت شناسايي دشمنان و نيز شكارها ي خود استفاده مي كنند. اما خطر اينكه فعاليت سونار سبب تداخل و اغتشاش در مسيريابي حيوانات ميشود وجود دارد، وشايد از تغذيه مناسب و جفت گيري آنها جلوگيري كند. گزارش اخير منتشر شده در ژورنال natureبيانگر تاثير عملكرد نظامي سيستم هاي سونار در بيماري ودر نتيجه به ساحل آمدن وال ها بود. سونار هاي فعال كه از ارسال پالس براي شناسايي اهداف خود استفاده مي كنند به طور غير مستقيم حيات حيوانات دريايي را به خطر مي اندازند، اگرچه تحقيقات علمي مجموعه اي از اين عوامل را موثر مي داند. در سال 2000، آزمايشي در ناوگان آمريكا با استفاده از فرستنده اي با قدرت 230db ودر فركانس بين 3-7 khz بر روي 16 وال ها انجام گرفت كه منجر به مرگ 7 وال گرديد. با اين وجود در صورتي كه قدرت پالس هاي ارسالي كم باشد خطري حيات پستانداران دريايي را تهديد نمي كند.
سونار غير فعال (passive sonar)
در اين نوع سونار ها تنها عمل گوش دادن (و عدم ارسال پالس ) انجام مي شود. ازكاربردهاي مهم اين سونار مي توان به عمليات جاسوسي كه از اين سونار بهره مي برند اشاره كرد.
سرعت صوت :
عملكرد سونار وابسته به سرعت صوت مي باشد. سرعت صوت در آب هاي شيرين آهسته تر از سرعت صوت در آب دريا مي باشد. در تمامي آب ها سرعت صوت وابسته به چگالي آب مي باشد. چگالي وابسته به پارامترهايي نظيردما واملاح آب ( معمولا ميزان شوري آب ) و فشار ميباشد. سرعت صوت به طور تقريبي برابراست با :
temperature (in °F)) + (0.0182 × depth (in feet) + salinity (in parts-per-thousand))
كه از رابطه بالا جهت فرآيندهايي از قبيل تغليظ آب و تعيين عمق آب استفاده مي شود. دماي آب متناسب با عمق آب از سطح دريا تغيير مي كند. اما در عمق 30 تا 100 متري از سطح دريا شاهد تغييرات قابل توجهي هستيم. كه به اين محدوده دما شيب (themocline) گفته مي شود كه حد واسطي بين آب گرم تر و آب سردتر است كه امواج صدا در اين ناحيه طوري خم مي شوند كه زير دريايي ها مي توانند با پنهان شن در زير اين ناحيه از آشكارشدن بگريزند.
دما شيب مكن است در آبهاي سطحي نزديك ساحل نيز وجود داشته باشد كه ما از منظور كردن آن صرف نظر ميكنيم.
فشار آب اغلب بر نحوه انتشار صوت اثرگذار است. افزايش فشار باعث افزايش چگالي شده كه در نتيجه شاهد افزايش سرعت صوت مي باشيم. افزايش سرعت صوت منجر به منكسر شدن آن در برخورد با محيط ديگر مي شود.كه به آن قانون شكست اسنل گوييم.
امواج صوتي كه در جهت پايين به سمت كف اقيانوس تابانده شده بودند به صورت قوس هايي كه وابسته به فشار آب ميباشند به طرف سطح آب بازتابيده مي شوند. اقيانوس بايد لا اقل داراي عمق 6000 فوتي باشند يا اينكه امواج به جاي اينكه انكسار يابند به طرف بالا پژواك شوند. تحت اين شرايط امواج در محدوده اي نزديك سطح دريا فوكوس ميشوند و مجددا به طرف پايين انكسار مي يا بند ( به صورت قوس ) هر يك از اين قوس ها با نام ناحيه همگرايي ( convergence zone) شناخته مي شود. قطر نا حيه همگرايي بسته به دماي آب و ميزان املاح آب مي باشد.
براي مثال در آتلانتيك شمالي قطر ناحيه همگرايي كه به فصل ندازه گيري وابسته بود و به صورت دايره هاي متحدالمركز شناخته مي شد برابر 33 مايل به دست آمد. در ضمن امواج شناسايي شده در صورتي كه داراي خط مستقيم بودند مسافت كمي را به خود اختصاص ددند اما در حالت دوم در فواصل بيش از 100 مايلي قابل شناسايي بودند. با توجه به عواملي از قبيل مسافت دما و موانع راه سيگنال دريافت شده توسط گيرنده داراي انرژي بسيار ضعيف تري نسبت به حالت اوليه بودند كه اين مشكل با استفاده از سونار هاي دقيق حل شد.
شناسايي منبع صدا :
سونارهاي نظامي زا راه هاي متعددي براي شناسايي منبع صوت استفاده مي كنند. براي مثال ناوگان ايالات متحده از سيستم هايي كه با جريان متناوب 60hz كار مي كنند بهره مي برد. در صورتي كه ارسال كننده ها بر روي بدنه كشتي و با ايزولاسيون كامل سوار شده باشند يا اينكه در آب شناور شده باشند يك صوت با فركانس 60 hz مي توان از ژنراتورهاي زيردريايي جهت كمك به تعيين اشياء كه اطراف زيردريايي هستند ساتع شوند. به طور قرار دادي اكثر زيردريايي هاي اروپا از فركانس 50hz جهت توان سيستم هاي خود استفاده مي كنند. نويز هاي ادواري نظير پيچ ها يا تكان هايي كه در زيردريايي هنگام افتادن در آب مي كنند نيز براي سونار نيز قابل شناسايي است.
سيستم هاي سونار غير فعال داراي اطلاعات بسيار مفيدي براي رادار هستند. با اين وجود اغلب طبقه بندي هاي انجام شده به طور دستي و توسط اپراتور انجام مي پذيرد. سيستم هاي كامپيوتري مكررا از اطلاعات پايه جهت تشخيص طبقه بندي كشتي ها سرعت كشتي نوع سلاح استفاده شده و حتي كشتي هاي خاص استفاده مي كنند. داده هاي طبقه بندي شده مرتبا توسط ناوبر به روز ميشود تا اشتباهي در دريافت اطلاعات رخ ندهد.
نويز (noise ) :
سيستم هاي سونار غير فعال به علت اغتشاشي كه توسط وسيله نقليه ايجاد مي شود داراي محدوديت هاي بسيار هستند. به اين دليل اغلب زير دريايي ها داراي واكنش پذيري هسته اي هستند كه در نتيجه بدون استفاده از پمپاژها به راحتي مي توانند سرد شوند و از انتقال دهنده هاي گرماي بي صدا يا استفاده از سوخت هاي فسيلي يا استفاده از باتري هايي كه در تمامي حالات مي توانند به طور بي صدا به فعاليت بپردازند استفاده كنند. وسايل انتقال دهنده مناسب با كمترين نويز ساتع شده به صورت دقيق طراحي و ماشينيزه مي شوند. اين انتقال دهنده هاي مناسب در سرعت هاي بالا تنها حبابهايي را درون آب ايجاد مي كنند و همچنين صداي خفيفي ايجاد ميكنند هيدروفونهاي سونار هاي فعال به طور مستور به بدنه كشتي يا زير دريايي يدك كشيده مي شوند تا تاثير نويز حاصل شده ناشي از خود زيردريايي كاهش يابد. اين هيدروفون ها بسته به كاربرد آن ها مي توانند در بالاي محدوده دماشيب يا پايين آن يدك كشيده شوند.در سالهاي زيادي ايالات متحده اقدام به ساخت و جايگزيني سونار هاي پسيو متعدد در نقاط مختلف اقيانوس هاي جهان كرد كه مجموعه آنها را sosus مي نامند. در تمام مت زماني كه عمليات نظامي نظير اكتشاف انجام مي شد آنها به صورت آهسته عمل كرده و به صورت كاملا مخفيانه يدك كشيده ميشدند.
اغلب نمايشگر هايي كه در سونارهاي غير فعال مي بينيم داراي تصاوير دو بعدي هستند. محور افقي بيانگر فركانس و محور عمودر بيانگر موقعيت رادار است.
سونار در جنگ

ناوگان ها يمدرن امروزي به طور گسترده از سونار استفاده مي كنند دو نوع سوناري كه در مباحث قبلي مطرح شد ( سونار هاي فعال و غير فعال ) به طور مكرر مورد استفاده قرار مي گيرند. زمينه فعاليت هاي اين رادار ها بسته به نوع موقعيت ناوها و زيردريايي ها تغيير مي كند و بسته به نوع عملكرد نظامي در زمينه هاي مختلف باهم تفاوت مي كنند. سونار هاي فعال زماني كه بتوانند موقعيت هدف را به خوبي تشخيص دهند بسيار مفيد هستند.
عملكرد سونارهاي فعال مشابه رادار مي باشد. پالس صوتي ارسال مي شود سپس امواج صوتي در تمامي مسيرها شروع به حركت مي كنند. زماني كه اين امواج به زمين برخورد ميكنند امواج برخوردكننده در تمام جهات بازتابيده مي شوند. و بعضي از سيگنال هاي بازتابيده شده به سنسور سونار فعال ميرسند. اين سيگنال هاي بازتابيده شده تكنيسين هاي سونار را قادر مي سازد تا به شناسايي پارامتر هايي از قبيل فركانس سيگنال انرژي سيگنال رسيده شده عمق درجه حرارت آب و درنتيجه موقعيت هدف بپردازند. اگرچه كه استفاده از سونارهي فعال در عمليات نظامي بسيار خطرناك است زيرا به راحتي توسط ناوها و زيردريايي هاي ديگر قابل شناسايي است.
براي اينكه نوع سونار ساتع كننده انرژي چيست كافي است تا به سيگنال صوتي ناشي از سونار گوش فرا دهيم (معمولا با استفاده از فركانس سيگنال هاي رسيده شده به سنسور ). در نتيجه با استفاده از انرژي دريافتي مي توان موقعيت رادار را شناسايي كرد. سونارهاي فعال قادر به شناسايي اهداف دريك فاصله معين مي باشند اما مشكل اين است كه اين رادار توسط شناساگرهاي ديگر در فواصل چندين برابر فاصله شناسايي اين سونارها قابل شناسايي هستند.
اهداف سونار رابطه كمي با محدوده اي كه سونار در مركز آن واقع شده است دارد. به طور نسبي بزرگي سيگنال دريافت شده از سونار ارسالي و نيز مسافت تا هدف وابسته است. و سيگنالها ي رسيده شده به سونار تنها مقدار كمي از اندازه سيگنال هاي ارسالي را به خود اختصاص مي دهند. حتي اگر سيگنال دريافت شده توسط سونار داراي قدرتي مشابه باشند.
مثال زير بيان كننده برخي از مشكلات به وجود آمده است :
فرض كنيم كه سونار قابليت ارسال سيگنالي با انرژي 20 وات و دريافت سيگنالي با حداقل انرژي 5 وات باشد. حال فرض نماييد كه در فاصله 500 متري انرژي سونار به ميزان 10 وات كاهش يابد. در صورتي كه سيگنالي كه بازتابيده ميشود به طور كامل بازتابيده مي شود با انرژي بيش تر از 5 وات به دريافت كننده سيگنال مي رسند سيگنال اصلي داراي انرژي بالاتر از سيگنال با انرژي بيش از 5 وات در فاصله بين 500 تا 1000 متري است. اما دراين فاصله سيگنال بازگشتي به سونار داراي انرژي كمتر از 5 وات است و در نتيجه توسط سنسور قابل شناسايي نيست و در صورتي كه از بويه صوتي استفاده كنيم پالس بازگشتي قابل شناسايي است.
گيرنده آكوستيكي يا فرستنده آكوستيكي راديويي نصب شده روي بويه كه مي تواند از هواپيما يا چتر پايين انداخته شود تا صداهاي زير آبي زير دريا ها را دريافت و آنها را به هواپيما ارسال كند. براي رديابي هدف تعداد زيادي بويه با الگوهايي كه داراي مكان هاي معلوم يا مشكوك بوده به حضور هدف فرستاده مي شود كه هر بويه سيكنال قابل شناسايي خود را ارسال ميكند.

در نتيجه جهت شناسايي سيگنال بازگشتي دو راه وجود دارد:
-
سيگنال ارسالي بسيار پر قدرت باشد.
-
شناساگرها بسيار حساس باشند تا بتوانند حداكثر فاصله رفت و برگشتي را كه موج بازگشتي ارسال ميكند تشخيص دهند.
زماني كه سونارهاي فعال ايجاد نويز هاي شديد مي كنند در نتيجه كسب اطلاعات توسط آنها ضعيف مي باشد اين نوع تشخيص توسط وسايلي كه سكوها بروي آنها نصب مي شوند نظير هواپيما و هلي كوپترها انجام مي گيرد وبه ندرت از زير دريايها يا كشتي ها استفاده مي گردد. زماني كه سونارهاي فعال توسط كشتي ها يا زير دريايي ها مورد استفاده قرار مي گيرند اين سونارها بوسيله تحريك هاي كوچك ادواري فعال مي شوند( به وسيله پريود هاي متناوب و به وسيله تحريك هاي ضعيف ) جهت كاهش خطر شناسايي زير دريايي توسط سونارهاي غير فعال دشمن در اغلب موارد سونار فعال به صورت پشتيباني براي سونارهاي غير فعال در نظر گرفته مي شود.
زماني كه از هواپيما استفاده مي شود سونارهاي فعال درقالب بويه هاي يك بار مصرف استفاده مي شوند كه در هواپيماهاي گشت زني يدك كشيده مي شوند يا در مجاورت يا نزديكي محدوده اي كه با سونارهاي دشمن در ارتباط هستند انداخته مي شوند بطور كلي سونارهاي غير فعال داراي محدوده و بست عملكرد گسترده تر نسبت به سونارهاي فعال جهت شناسايي و كسب اطلاعات مورد نظر از هدف هستند.
زماني كه هر يك از وسايل موتور ريزه شده توليد بعضي تحريكات مي كنند ممكن است سونار مورد نظر شناسايي شود. جهت بهبود وضعيت شناسايي سونارهاي غير فعال اين سونارها داراي چشمي هستند چشمي مركزي داراي ديد 270 درجه است و دو چشمي ديگر كه در دو سمت سونار تعبيه مي شود هر كدام داراي ديد 160 ردجه مي باشد در نتيجه سونار داراي ديد 360 درجه نسبت به محيط اطراف خودمي گردد.
دراينجابا دو مسئله مواجه مي شويم نخست نويزهاي كه زير دريايي توليد مي كند ديگر سيگنالهاي دريافتي رسيده به سونار هنگامي كه يك سيگنال در يك جهت مشخص شناسايي مي شود و توسط سونار تعيين مي گردد ( بدين معنا كه هر سونار داراي ناحيه ديدي است كه قادر به شناسايي سيگنالهاي دريافتي است كه به آن پهناي باند موقعيت گفته مي شود ) اين سيگنال توسط سونار آناليز مي شود ( آناليز با استفاده از پهناي باند باريك ) كه به طور كلي از تبديل فوريه براي مشخص كردن سيگنال و آناليز آن استفاده مي شود سيگنال اصلي داراي فركانسي است وهر كدام از موتورها نويزهاي با فركانس مشخص توليد مي كنند در نتيجه با استفاده از يك فيلتر فركانس گزين به راحتي سيگنال اصلي از داخل سيگنال همراه با نويز تشخيص داده مي شود.
يكي ديگر از كاربردهاي سونارهاي غير فعال در مسيريابي اهداف مي باشد. اين فرايند با نام آناليز حركت هدف( Target motion Analysis) شناخته مي شود و قادربه مشخص كردن محدوده حركت هدف جهت راستا و سرعت هدف مي باشد. TMA طي فرايند خاصي وبا استفاده از دريافت سيگنالهاي با جهت هاي مشخص از زمانهاي متفاوت انجام مي گيرد وهر سيگنال بيانگر مكاني است كه هدف در آنجا قرار مي گيرد با مقايسه اين مكانها توسط اپراتور مي توان نحوه حركت را مشخص كرد. هنگامي كه آناليز حركت نسبي هدف انجام مي گيردبه يك مدل هندسي كه با تعيين شرايط محدود انجام مي پذيرد دست مي يابيم.
يكي ديگر از كاربردهاي سونارغير فعال انجام عملياتهاي جاسوسي مي باشد. در اينجا وجود تكنولوژي بالا از جمله فيلترهاي فركانس گزين و نيز دريافت كننده هاي حساس ضروري است. در نتيجه هزينه سيستمها سنگين مي شود بطور كلي اين آرايش در كشتيهاي گران قيمت جهت بهبود وضعيت تشخيص ( شناسايي آنها ) استفاده مي شود. زيردريايي هاي مجهز به سونارهاي غير فعال داراي اين قابليت هستند كه در زير لايه هاي حرارتي آب مخفي شده يا اينكه با پائين رفتن در جهت عمق دريا مي توانند سرعت خود را بهبود بخشند. البته متعاقبا نويزهاي توليد شده نيز افزايش مي يابد.
فيشرايزهاي اكوستيكي (Fisheries Acoustics)
اين فيشرايزها در سونارها جهت شناسايي توده هاي ماهي انجام مي پذيرد يك پالس درون آب ارسال شده وبا برخورد به اشياء مورد هدف سونار كه داراي چگالي متفاوتي نسبت به محيط اطراف خود هستند فرستاده مي شوند مانند ماهي كه صوتي را نسبت به منبع صوت پاسخ مي دهد در واقع يك عكس العمل اكوستيكي از خود بروز مي دهد اين پژواك حاوي اطلاعاتي از قبيل اندازه ماهيها و موقعيت و فراواني ميزان ماهي ها مي باشد. سخت افزارهاي كه براي اكوسوندر( echosounde) مورد نياز است جهت فعاليتهاي از قبيل فرستادن صدا، دريافت، فيلترينگ، آناليز كردن پژواك مورد استفاده قرار مي گيرد.
كاربرد فيشرايزهاي اكوستيكي (Fisheries Applications )
ماهي گيري يكي ازصنايع مهم است كه با تقاضاي زيادي روبرو شده است اما ميزان صيد جهاني به علت عدم دسترسي به منابع و نيز محدوديت منابع مشكل شده است در نتيجه تقاضاي ناوگانهاي ماهي گيري جهت بكارگيري روشهاي مصنوعي جهت شكار با استفاده از وسايل الكترونيكي نظير سنسورها، مولد صدا و سونارها افزايش يافته است. ماهي گيرها در طول تاريخ روشهاي متعدد و گوناگوني جهت بهره برداري كردن وصيد ماهي ها استفاده كرده اند. بنابراين وجود تكنولوژي هاي اكستيكي يكي از روشهاي بسيار موثر در ماهي گيري تجاري است.
عبور امواج صوتي ( انتشار امواج صوتي به علت تفاوت چگالي بين ماهي و آب متفاوت است اين تفاوت به ما اجازه شناسايي توده هاي ماهي را مي دهد تكنولوژي اكوستيك در زير دريا كابرد فراوان دارد زيرا امواج صوتي در آب به مراتب مسافت بيشتري را مي پيمايد. امروزه كشتيها و ناوهاي ماهي گيري فعاليت صيدي خود را به طور كامل بروي تكنولوژي اكوستيك، سونارها و مولد هاي صدا متمركز كرده اند. امروزه از سونارهاي فعال جهت تعيين عمق آب و شناسايي وضعيت كف دريا استفاده مي گردد.
واژه نامه :
Acostic sounding : عمق سنجي آكوستيكي
استفاده از امواج صوتي براي تعيين سطح عمق آب، از طريق ندازه گيري زمان لازم براي رفت و برگشت پالس صوتي.
Acoustic acoustic: بازتابش آكوستيكي.
Thermocline : دماشيب.
واسطي ميان آب سردتر و گرم تر اقيانوس، كه امواج سونار درآنها طوري خم ميشوند كه زيردزيايي ها مي توانند با پنهان شدن زير اين واسط از آشكارشدن بگريزند.
Sonobouy , radio sonobouy : بويه صوتي، بويه صوتي راديويي.
Chirp : چهچهه
-
تغيير نامطلوب در بسامد حامل موج پيوسته در هنگام كليدزني آن.
-
صداي شنيده شده در گيرنده رمز هنگامي كه بسامد حامل فرستنده به صورت خطي در مدت زمان پالس رمز افزايش ميابد.
گيرنده آكوستيكي و فرستنده راديويي نصب شده روي بويه، مي توانند از هواپيما يا چتر پايين انداخته شوند تا صدا هاي زير آب زير دريايي ها رادريافت و آنها را به هواپيما ارسال كنند. براي رديابي زيردريايي ها تعداد زياده با الگوهايي كه داراي مكان هاي معلوم يا مشكوك به حضور زيردريايي انداخته مي شود كه هر بويه سيگنال قابل شناسليي خود را ارسال مي كند. سپس كامپيوتر هواپيما مكان زيردريايي را با مقايسه سيگنال هاي دريافت شده و تاخير زماني حاصل زا آن تعيين مي كند.
Fishery: شيلات، حوضه ماهيگيري.
Hydrophone : آب صدا سنج، آب آوا سنج.
Echo location : پژواك مكاني.
مطالب مرتبط



برچسب ها : 155 سورس ویروس و تروجان به زبان دلفی, Sonar, ارایه فازی, ارایه فازی سونار, امواج التراسونیک, امواج فراصوتی, امواج ماورا صوت, رادار, رادار دریایی, رادار سونار, سونار, کاربرد امواج صوتی, کاربرد سونار
دیدگاهتان را بنویسید
بخش های مورد نیاز علامت گذاری شده اند
نشانی ایمیل منتشر نخواهد شد

مطالب جدید
- IEDScout 5.22 پایش و عیب یابی IED در شبکه
- TINA 16 تحلیل مدار آنالوگ، دیجیتال، MCU و مختلط
- EMD energyPRO 5 تحلیل سیستم های انرژی
- ADAPT PT/RC 23.0.1 تحلیل غیرخطی تیر و سازه بتنی
- RISA Section 2.1.1 تحلیل مقاطع فولادی و سازه ای
- vMix 29 تولید و پخش زنده حرفه ای
- Ampsa ADW v24 طراحی تقویتکننده RF
- Ampsa MW v24 طراحی شبکه تطبیق امپدانس RF
- DSS Professional 8.7 مدیریت و نظارت تصویری هوشمند
- PowerACOUSTICS 2026 تحلیل آکوستیک و نویز در طراحی صنعتی

مطالب پربازدید
- دانلود کتاب هیدرولیک و پنوماتیک فستو Festo فارسی
- دانلود استاندارد
- دانلود نرم افزار کلید فولاد (Key to Steel) پرتابل
- دانلود فول استاندارد ASTM بصورت رایگان
- آموزش میکروکنترلر AVR
- دانلود آنتی ویروس شورتکات (Back 2 Normal)
- دانلود جدول استاندارد DIN
- دانلود کتاب آموزش Abaqus (فارسی)
- دانلود نرم افزار MATLAB برای آندروید(MATLAB Android)
- فول استاندارد ASME (بروز)

مطالب تصادفی
- Reflexw 2025 پردازش اطلاعات لرزهای و ژئوفیزیک
- MSC SimOffice شبیه سازی یکپارچه
- Keysight WaferPro 2023 اندازهگیری ویفرهای نیمههادی
- مجموعه هندبوک آلتراسونیک و تست آلتراسونیک
- OptiBPM v13.1 طراحی تجهیزات نوری و موجبرها
- نرم افزار Codeware COMPRESS طراحی و تحلیل مخازن تحت فشار
- نرم افزار MSC MaterialCenter 2025.1 دیتابیس جامع اطلاعات مواد
- PASS/START-PROF 2024 نرم افزار تحلیل لولهکشی صنعتی
- نرم افزار Capital X Panel Designer 2025 طراحی اتوماسیون صنعتی
- HTZ Communications 2024.7 طراحی و بهینهسازی شبکه رادیویی

شبکه های اجتماعی
دانشنامه تخصصی مهندسی ایران را در شبکه های اجتماعی دنبال کنید


